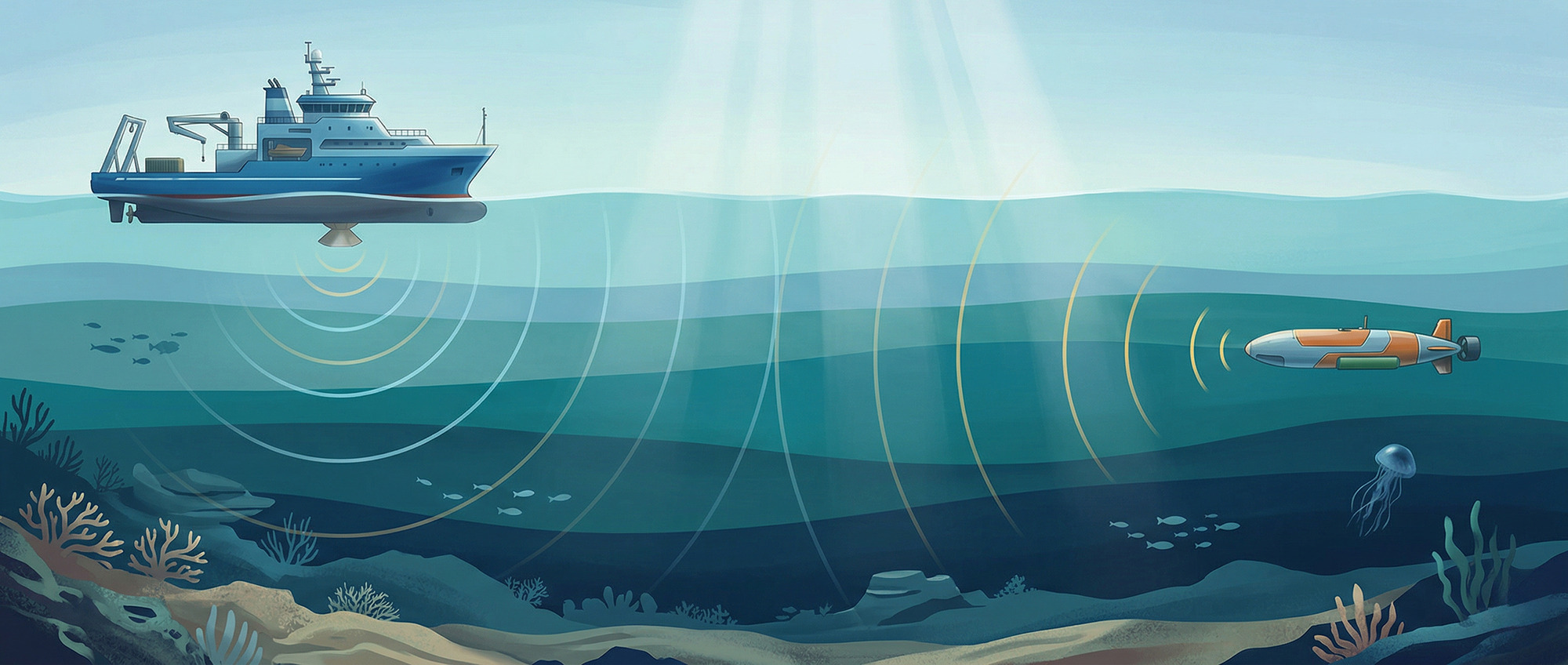
Picture this: You are running a mission with a mobile underwater node. You have a multi-receiver acoustic system on your surface vessel ensuring a robust, high-speed communication link. But as the autonomous underwater vehicle (AUV) navigates the mission, you also need to know exactly where it is. What if you didn’t need to deploy a completely separate tracking system for this? What if the exact same hardware you are using to talk to your AUV could also be used to track it?
In part 1, we discussed the first three levels, technology choices, integration hygiene, and deployment planning. Those alone get you most of the way to confident connectivity. In this post, we’ll describe the last two levels, where systems adapt in real time and missions flex slightly to help communication.
This two-part article is based on the talk “Connectivity with Confidence: Acoustic Communication and Navigation in Practice,” delivered by Professor Mandar Chitre (National University of Singapore). The blog was written to distill the key ideas from that presentation into a written form for a wider audience.
Underwater wireless communication is difficult to design, test, and deploy. The ocean is an unforgiving test environment, with dynamic and often unpredictable propagation characteristics. Access to vessels, dive teams, and favorable weather windows often restrict testing frequency, making rapid iteration nearly impossible.
Unet audio is a great educational tool for using and testing Unet implementations using UnetStack. Unet audio uses your computer’s sound card as an acoustic modem. Almost the entire functionality of UnetStack is available in Unet audio, so you can easily develop and test Unet Agents, try out communications algorithms, and even test your scripts and programs written to interact with UnetStack without needing any extra hardware.